 Оглавление: Шасси | Мозги | Программа
Оглавление: Шасси | Мозги | Программа
В прошлой статье я рассказывал, как собрать шасси робота Бендера. Напомню, голову Бендера сформировала банка из под орешков. Пришло время наполнить эту банку «мозгами»-электроникой! Начнем с постановки целей. Для начала ничего сверхъестественного. Раз робот задумывался для демонстрации работы системы ZiChip, все должно быть просто. Позже попробуем усложнить функционал (это тоже планируется для демонстрации системы ZiChip).
Функции, планируемые к реализации у робота:
— управление с любого ИК-пульта, его изучение
— движение в произвольные стороны, повороты
— световая индикация «ртом» и «глазами»
— звуковое сопровождение команд.
Элементная база.
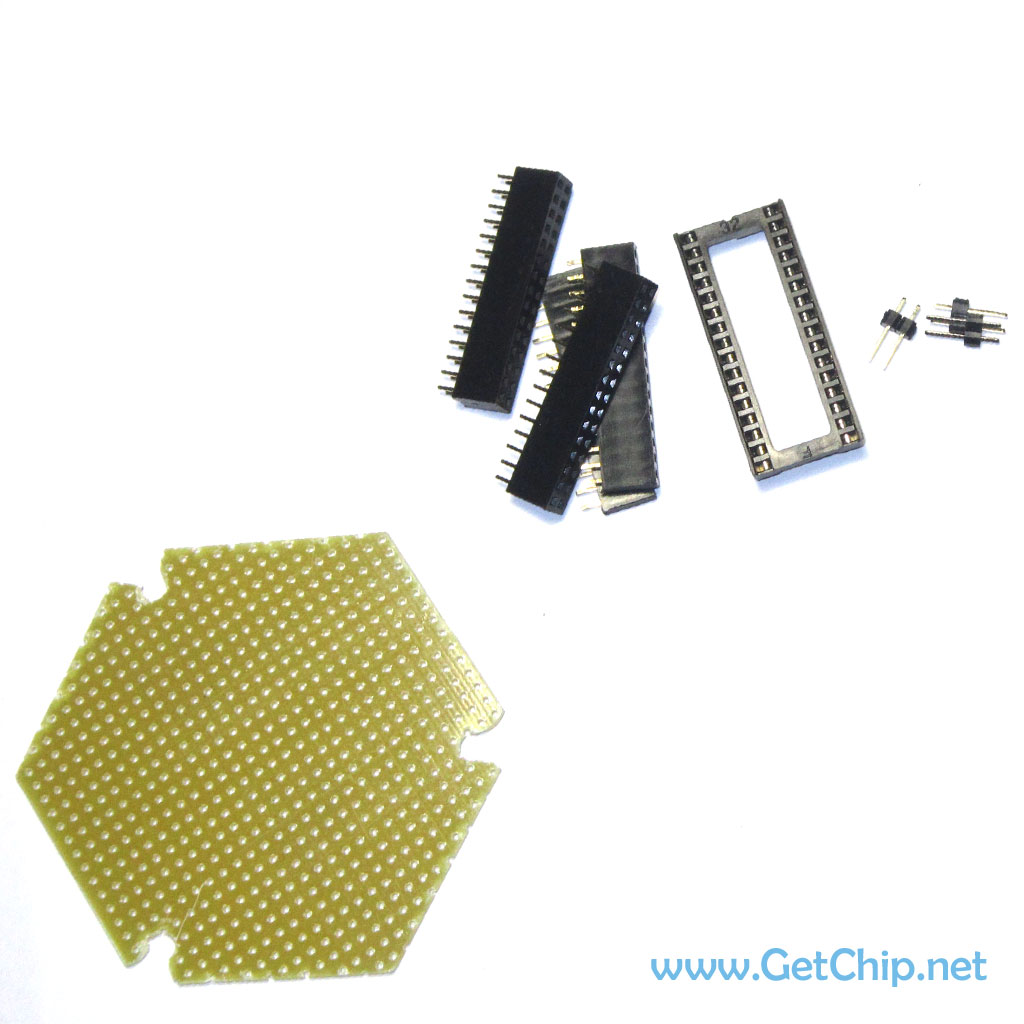
За основу будет взят микроконтроллер ATmega88/168/328. Еще нам понадобится преобразователь USB-UART для связи с компьютером. Для управления двумя редукторами возьмем драйвер двигателей постоянного тока L293D. Для звука нужен небольшой динамик, можно пьезоизлучатель. В качестве ИК-приемника подойдет TSOP4836 или TSOP1736, или какой есть. Для световой индикации «рот» и «глаза» понадобятся 8 светодиодов 4.8мм широкоугольных белых (они наилучше подходят для нашей цели, но можно заменить и другими – не критично). Еще один светодиод в антенну как индикатор работы робота – подойдет любой. Понадобятся резисторы на 300 или 470 Ом – с десяток. Конденсаторы 10 мкФ и 0.1мкФ штук по пять. Кнопка. Штырьки на плату PLS, ответные к ним гнезда BLS. Соединительные провода и макетные платы (пару штук размером 800х800мм). Панельки для микросхем L293D и ATmega88 (а если планируется использование Arduino Nano, то панелька под нее – 32-широкая).
Конструкция плат и их размещение.
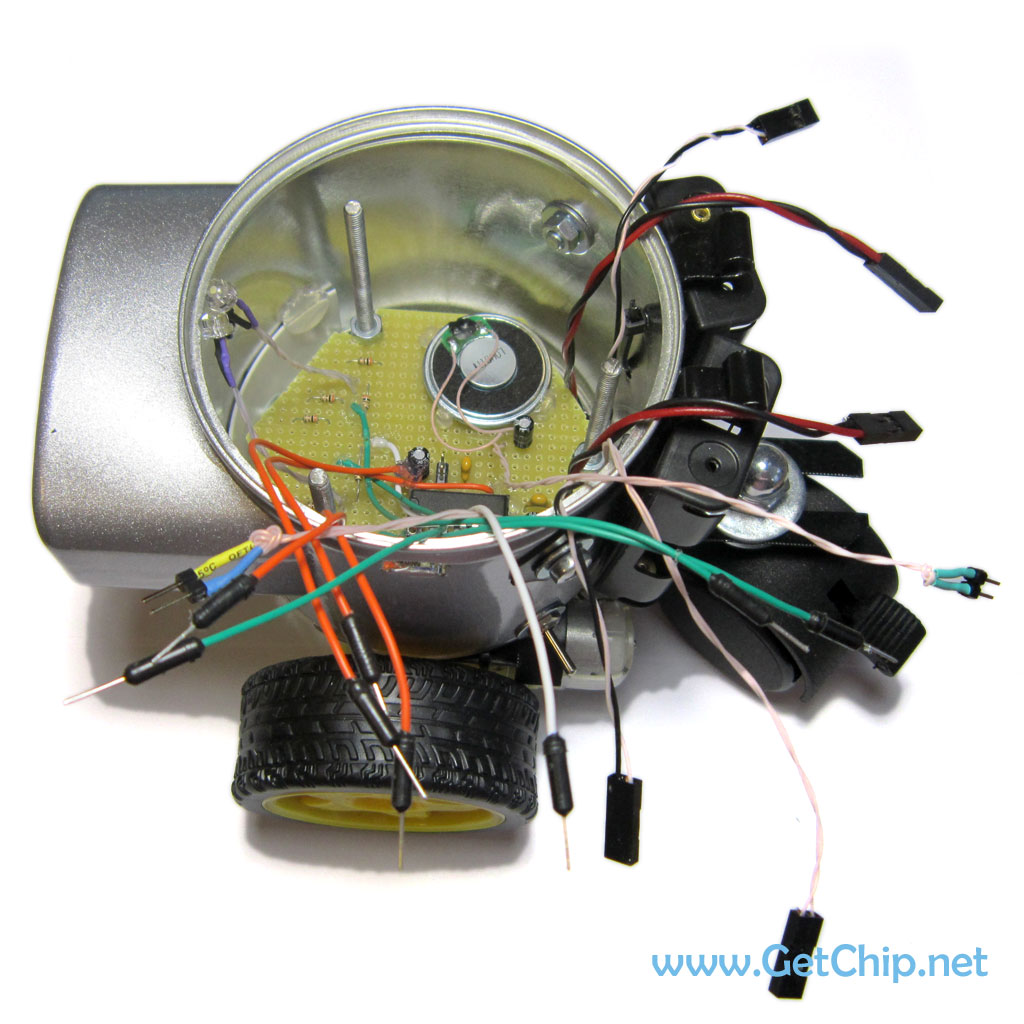
Вся электроника, на данный момент, будет размещаться на 2х платах, закрепленных друг над дружкой на трех шпильках в банке.

На первой плате разместится драйвер двигателя, динамик, светодиоды «рта» и «глаз», вторая плата будет содержать микроконтроллер и цепи обвязки. Отдельно будут вынесены, в «антенну» робота индикаторный светодиод и в купол – ИК приемник. Платы между собой будут связаны разъемами, причем эти разъемы будут выполнены таким способом, чтобы имелась возможность в любой момент времени менять конструкцию и варианты подключения. Плата с МК будет представлять собой некое макетное поле с гнездами, в которые произвольно можно будет подключать периферию.
Начало сборки – шасси.
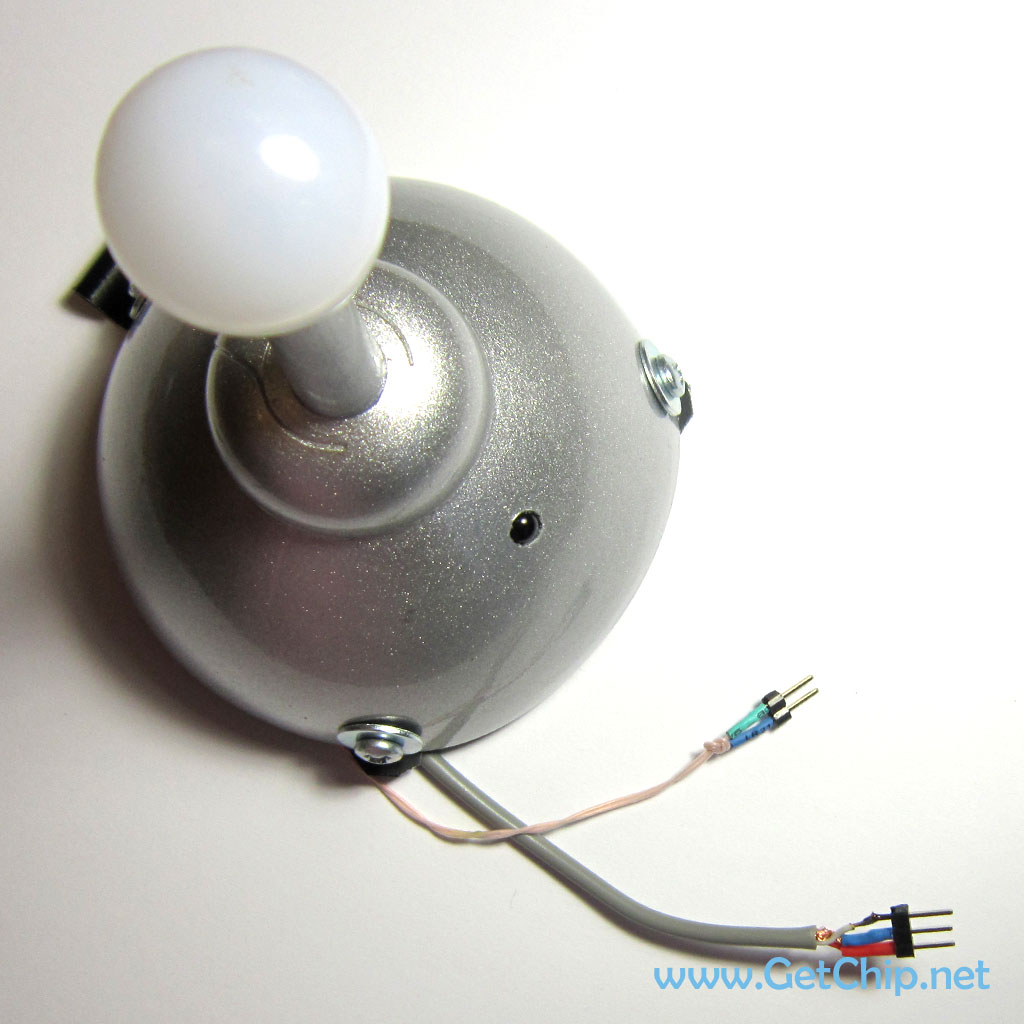
Перед началом сборки плат, нужно сделать «обвязку» нашего шасси, а именно — сделать выводы от моторов, батарейных отсеков и тумблера включения. Все разъемы шасси будут BLS (мамы) и провести их нужно через дно банки (просверлив отверстия в задней части дна). Для удобства, длинна проводов должна быть такой, чтобы разъемы показывались из банки сантиментов на 5.

Визуально это выглядит так:

Плата драйверов.
Переходим к первой плате – плате драйверов. Схема этой платы максимальна проста.

Так как разводка этой платы элементарна, я не стал разводить и травить печатную плату, а взял подходящую по размерам (800х800мм) одностороннюю макетную млату, по шаблону из файла шаблонов обрезал ее и сделал монтаж на ней
[Загрузка не найдена]

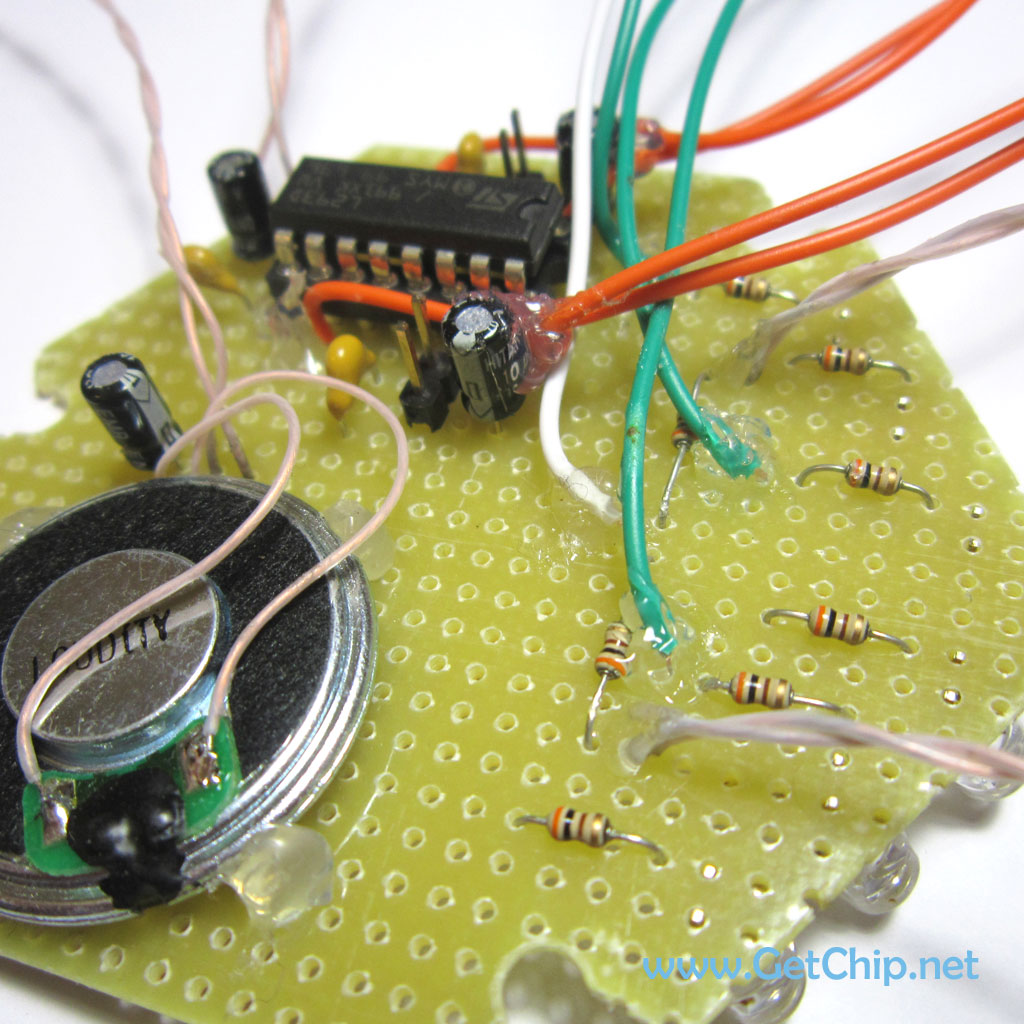
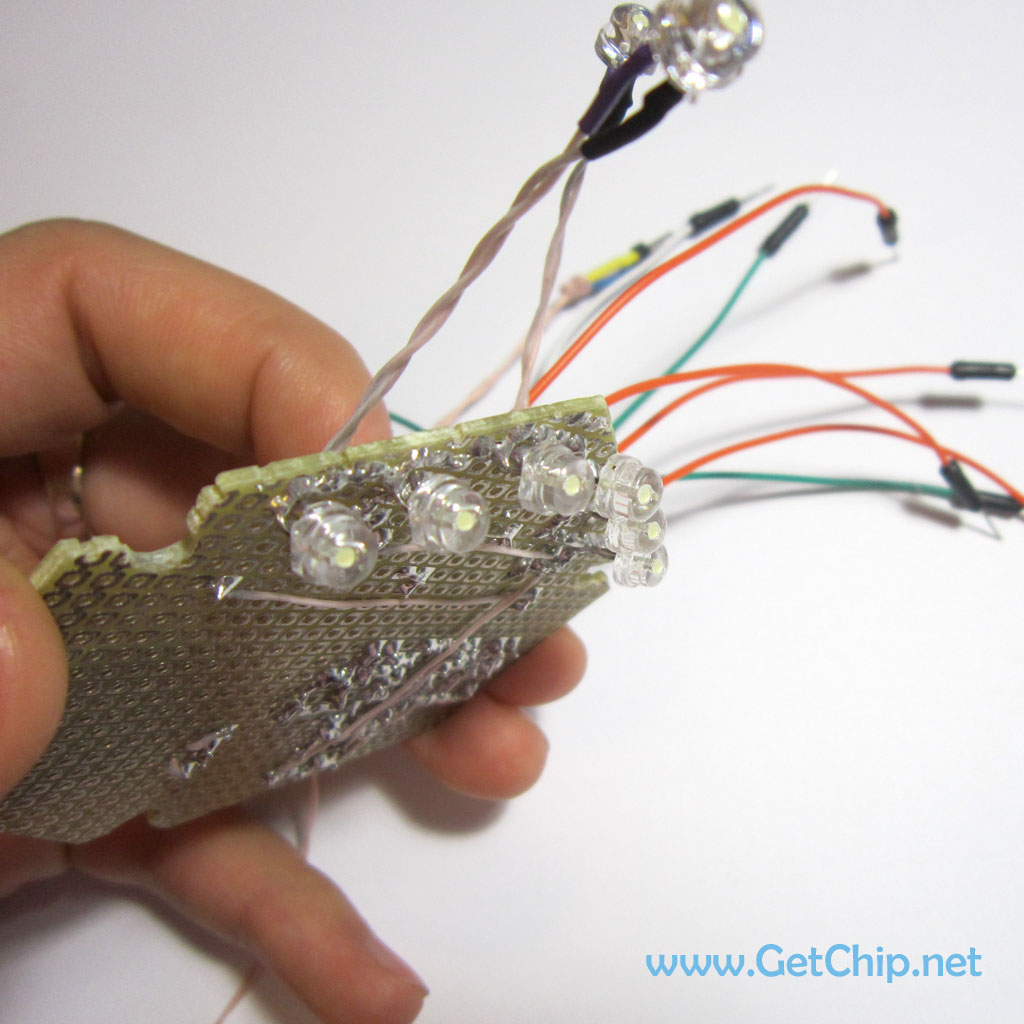
Монтаж занимает буквально полчаса – все просто, но есть пара нюансов, которые нужно учитывать. Светодиоды для «рта» крепятся полукругом под платой со стороны площадок и наклоняются в сторону рта под углом в 45 градусов (примерно – в работе откорректируем для лучшего визуального эффекта). Два светодиода для «глаз» нужно вынести над платой на проводках длиной по 5 сантиметров, чтобы при монтаже они достали до соответствующих отверстий в банке. Разъемы, отходящие от платы, используем типа PLS.
Для удобства я использовал готовые провода-перемычки со штырьками для контактных макетных плат. Если у Вас есть такие – используйте их, если нет – откусывайте по одному штырьку PLS и припаивайте к проводкам.
Так как планируются определенные манипуляции с разъемами, то, желательно, места подхода проводов к плате залить горячим клеем, дабы те со временем не поотлетали. Готовая плата с проводами-разъемами получается вот такой:

Правда, похожа на осьминожку? 🙂
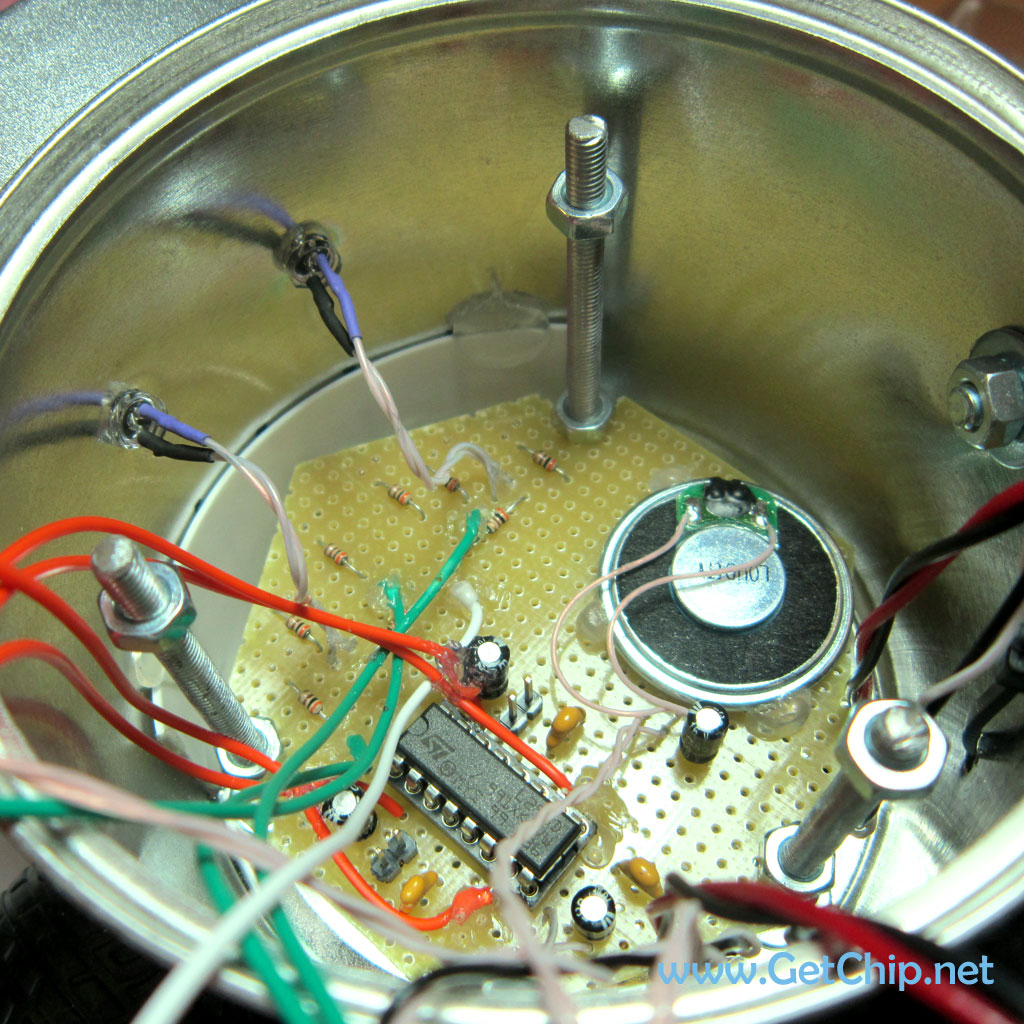
Спаянную плату закрепляем внутри банки при помощи гаек (одна снизу вторая сверху и зажимаем).
Плата микроконтроллера.
Плату микроконтроллера, в виду ее простоты, я тоже рекомендую собрать на макетке. Но перед началом сборки платы нужно сделать выбор, какой Вы хотите ее сделать. Есть два варианта реализации – подешевле и попроще.
Первый вариант – это собрать плату, используя микроконтроллер ATmega88/168/328. Это, наверное, вариант подешевле, но придется отдельно использовать USB-UART преобразователь (кстати, в этом случае удобно использовать шнурок-преобразователь, например, такой>>). Еще придется устанавливать цепи обвязки (правда совсем чуть-чуть) – кварц, несколько конденсаторов, резистор, разъем для программирования ICSP.



Я выбрал второй вариант попроще – использование модуля Arduino Nano. В этом варианте все максимально упрощается. Не нужны цепи обвязки, не нужен USB-UART преобразователь (он уже присутствует в модуле) и еще, Ардуину можно прошить прямо по USB шнурку (не нужен программатор).

Платы Arduino довольно удобны для создания несложных устройств (причины перечислил выше) но, честно говоря, я не поклонник их применения. Прохладное отношение у меня не от функционала (вернее его отсутствия) или языка программирования (никогда на нем ничего не писал, поэтому ничего не скажу) – всему виной цена. Покупать оригинальную плату за 30$ для того, чтобы помигать светодиодом — это как то слишком! Но в данном случае выбор оправдан, так как позволяет максимально просто получить все необходимые компоненты в одном месте. А еще китайцы здорово могут помочь с ценой 😉

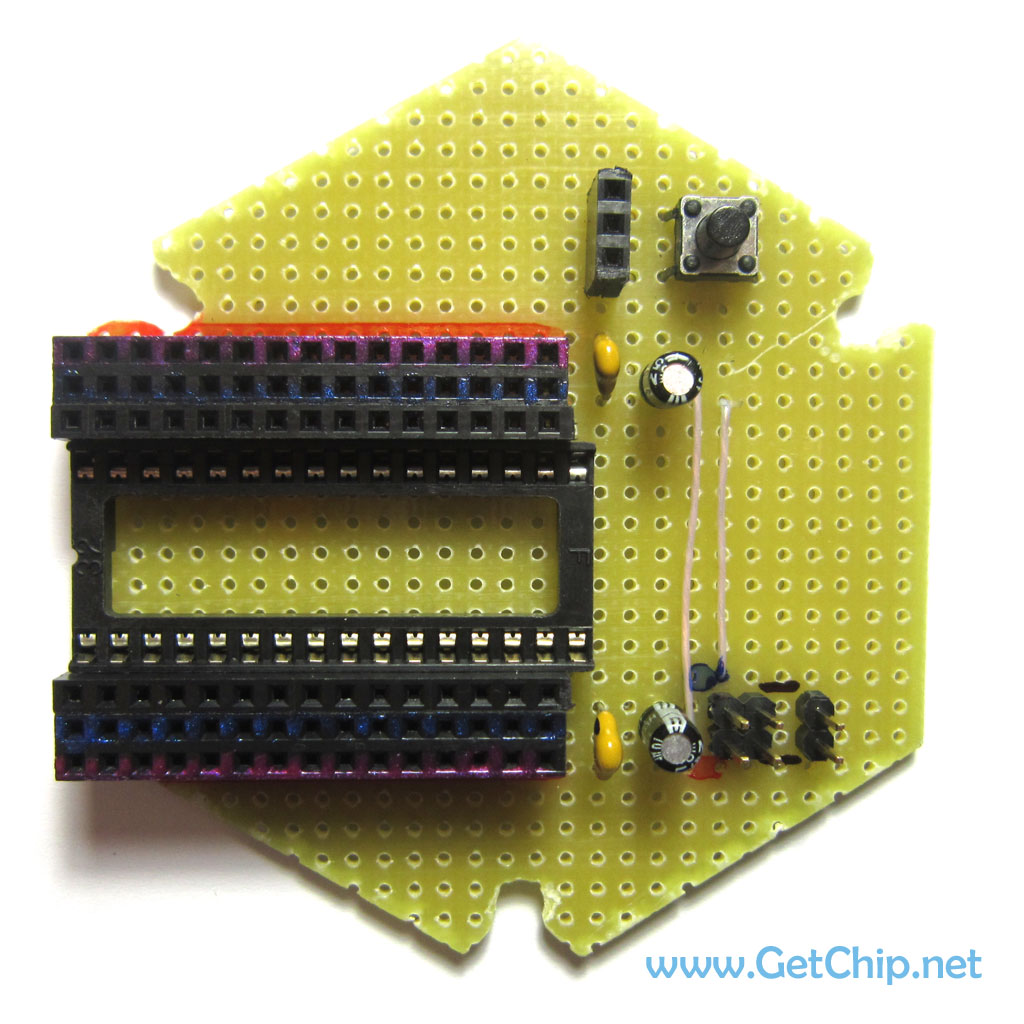
Для установки ардуины в нашу макетку используем широкую панельку на 32 ножки. Панельку лучше взять обычную не цанговую – легче вставляется модуль. По бокам от модуля устанавливаем по три линейки BLS-гнезд (сигнал, земля, питание) – это наше макетное поле для подключения периферии. Еще на макетке устанавливаем кнопку (и гнезда для нее), штырьки для подключения батареек, штырьки для тумблера включения и сглаживающие конденсаторы. Питание на Arduino будет подаваться с макетного поля при помощи перемычек. Закрепляем плату в банке аналогично плате драйверов.

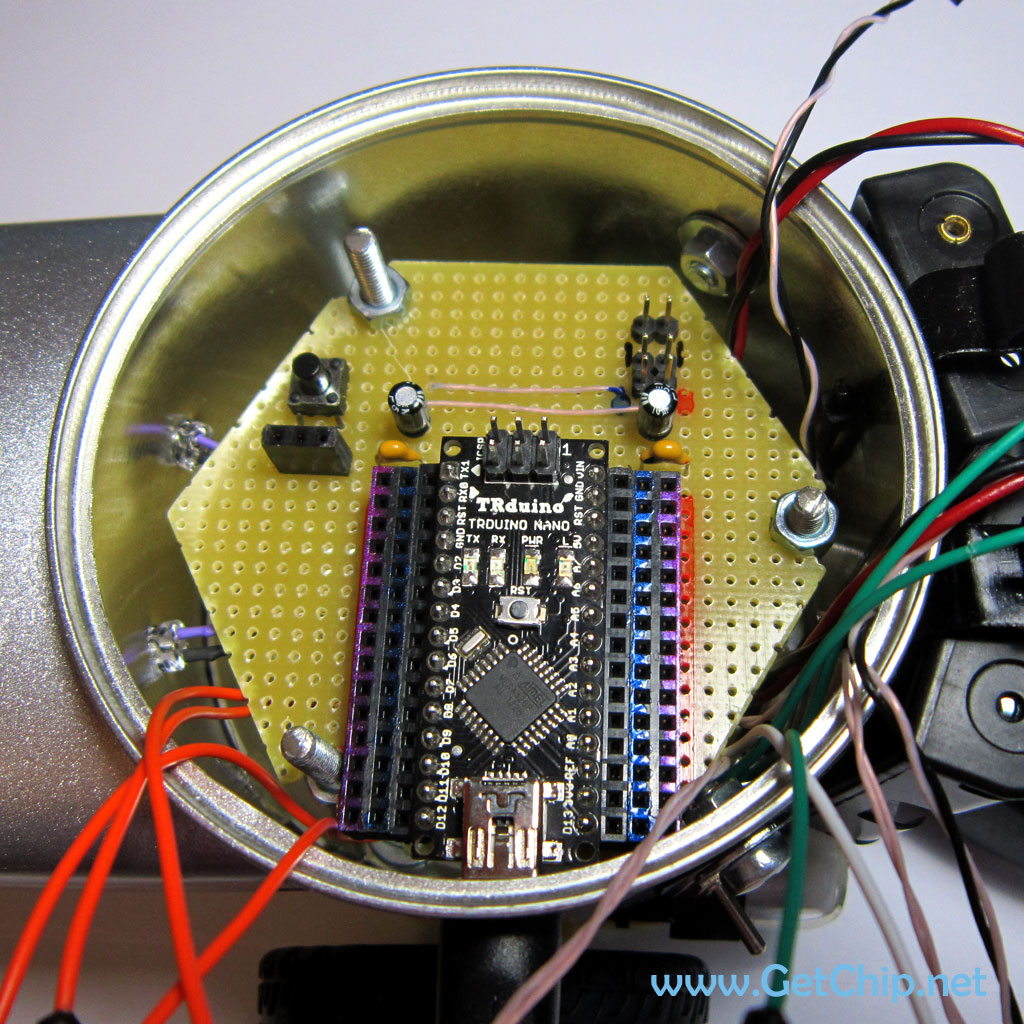
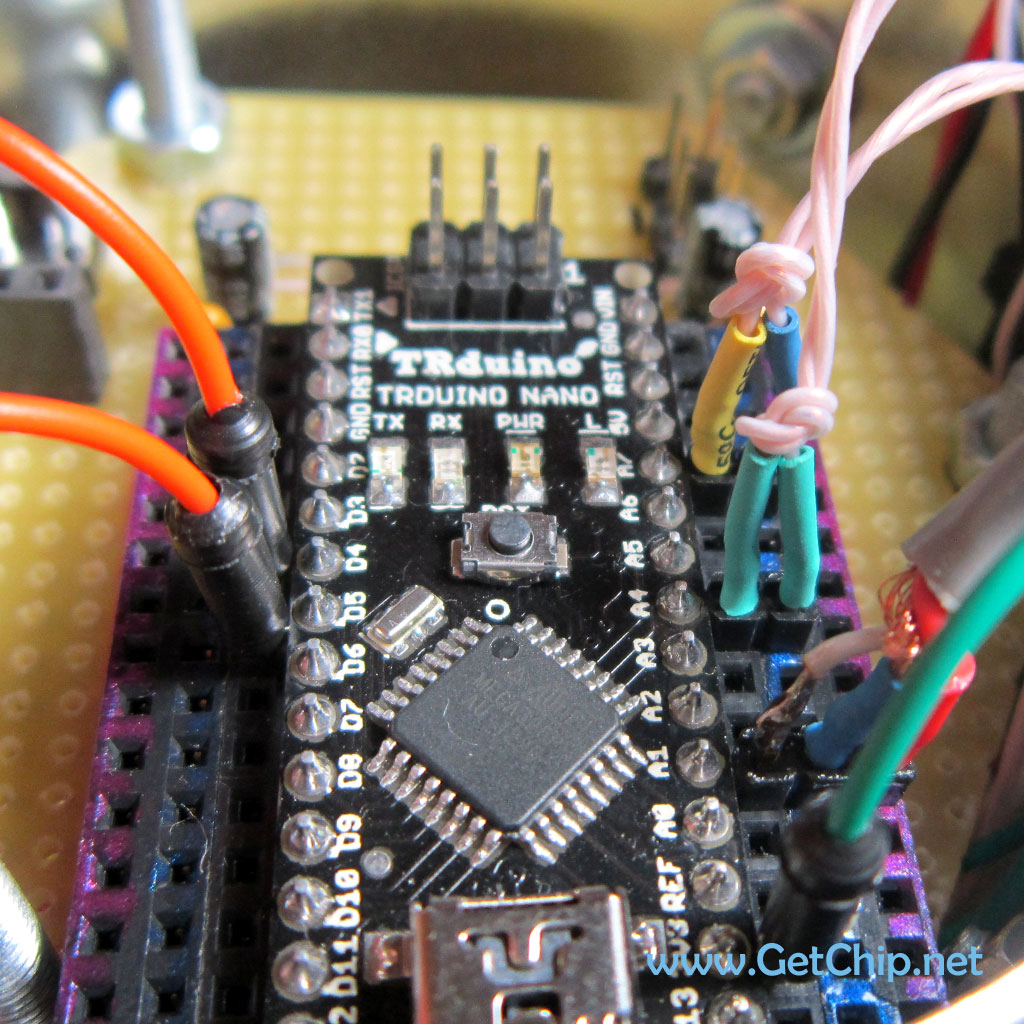
Плата Ардуино устанавливается таким образом, чтобы USB разъем был расположен максимально близко к стенке банки. В этом месте прорезаем прямоугольное отверстие для подключения USB шнура. Теперь робота можно будет перепрограммировать (или управлять им) не откидывая купола головы!

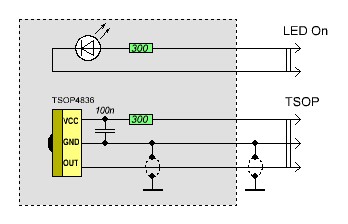
Модуль ИК приемника.
Последняя деталь мозгов на сегодня – модуль ИК-приемника. Здесь все просто — прямо на ножки TSOP припаиваем конденсатор, резистор и провода. В виду того, что TSOP очень чувствительный к помехам провод, идущий к разъему, должен быть экранированным. В куполе (в передней части) делаем отверстие, устанавливаем TSOP и закрепляем горячим клеем.
Надеюсь, одного TSOP приемника хватит для надежного приема сигнала в разных положениях робота за счет отражений от стен и потолка. Если будут проблемы, в процессе обкатки установим еще один.
Еще делаем вывод от индикаторного светодиода в антенне (не забываем последовательно со светодиодом припаять балластный резистор). Разъемы от ИК-приемника и индикаторного светодиода нужно установить типа PLS.


На сегодня все. В следующей статье попробуем «оживить» нашего Бендера и поработать в ZiChip Тюнере.
Оглавление: Шасси | Мозги | Программа
